Your wrists control the clubface & ball flight
Your wrists are the only link between your body and the golf club. Wrists dictate the clubface, shaping the ball flight.
Your wrists are the only link between your body and the golf club. Wrists dictate the clubface, shaping the ball flight.
“It’s never been easier to measure what you’re doing with your golf swing”
“HackMotion is one of the most multi-dimentional teaching aides you can find”

“Of course, I have a bad slice. The HackMotion has helped me with my hand position at the top and also helped me learn what it feels like to reduce extension throughout the downswing. Amazing device, using it in every session now!”

Our super-quick setup process saves time, allowing you to train with real-time data every practice session. Focus on improving your golf swing without the hassle of long setup time.
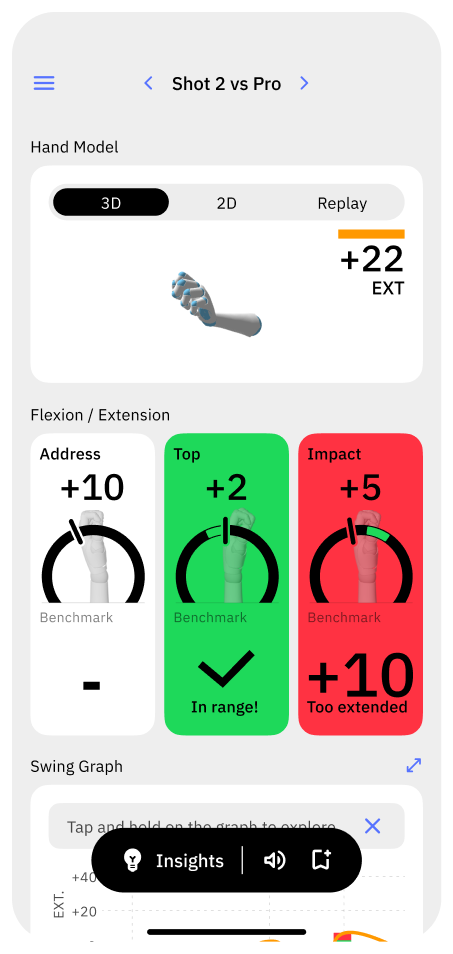
Learn the correct wrist motion faster with real-time audio feedback. HackMotion has an intuitive interface that provides instant feedback which accelerates the process of bringing swing changes to the golf course.
HackMotion automatically analyzes your data and selects drills customized to your swing. With this powerful golf training aid, you’ll see improvement from the very first session.
Get a lasting upgrade to your practice sessions for the price of a few golf lessons with a coach. Whether you are a beginner or an experienced golfer, it’s the perfect tool to help you unlock your golf swing’s full potential.
All HackMotion products use the same cutting-edge hardware.
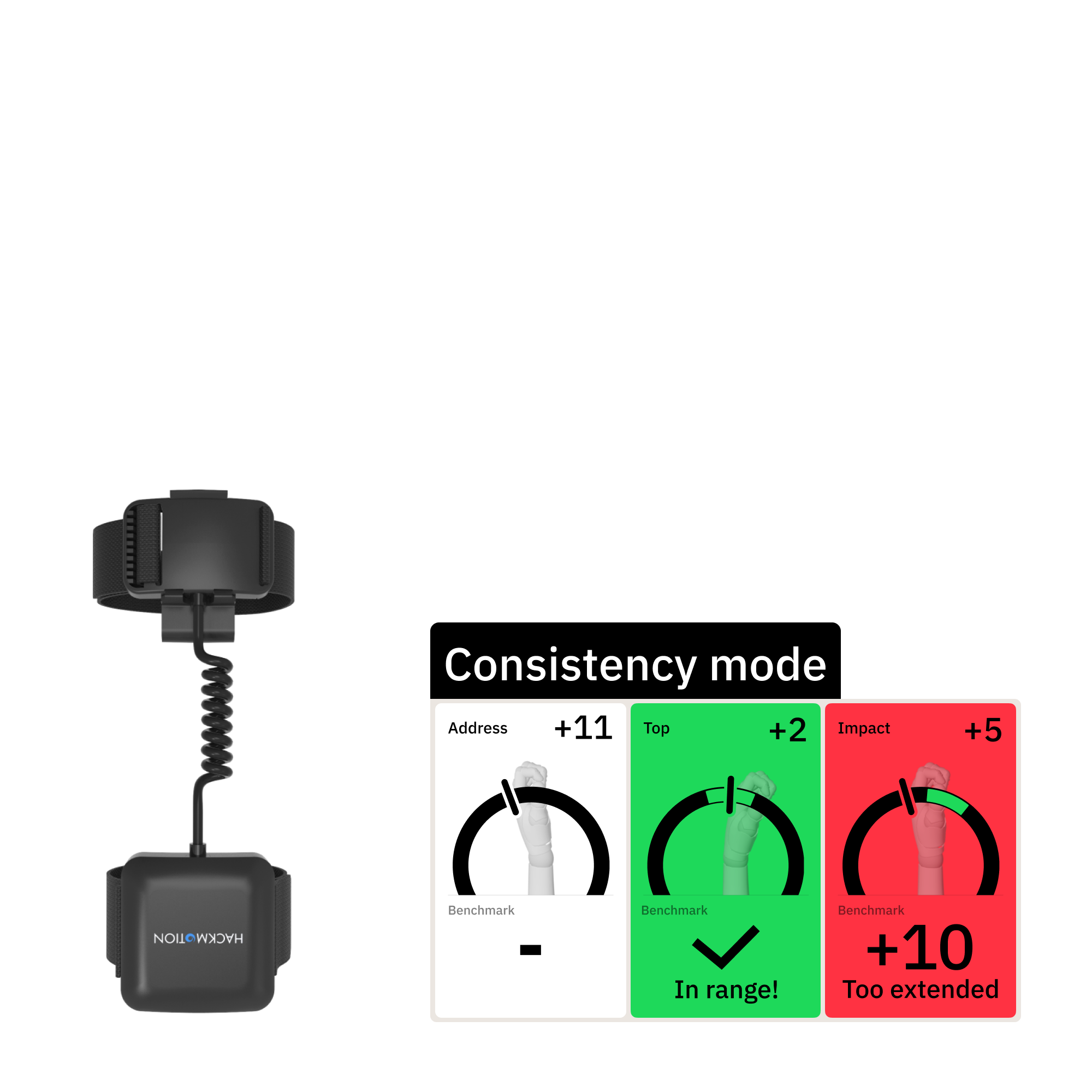
For players who want to improve clubface control and full swing consistency by optimising wrist angles
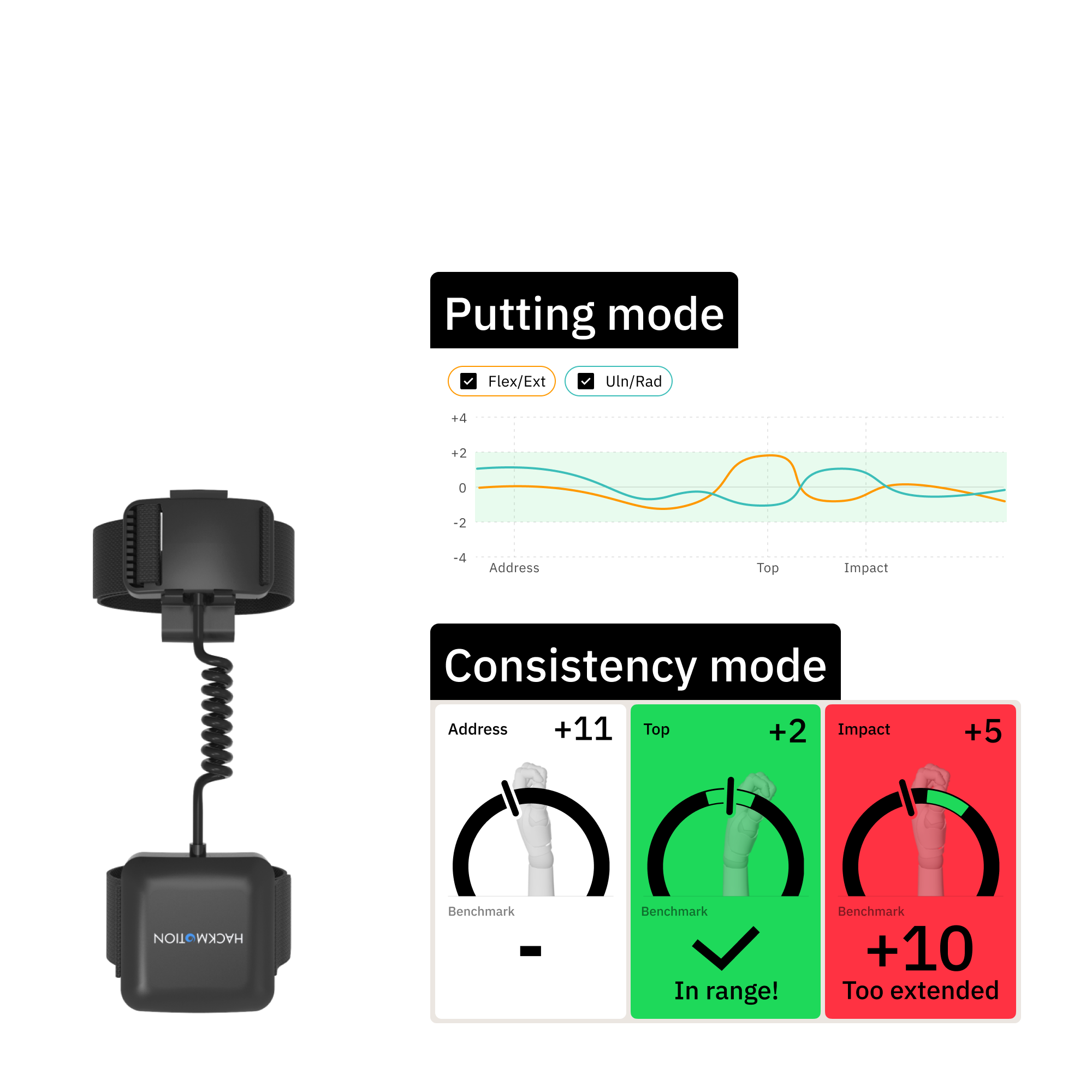
Work on your whole game by optimizing both the full swing and putting. Reach your peak performance.

All the wrist data, tour data and analytics for both hands in the ultimate feature package.
Copyright 2024 © HackMotion | All Rights Reserved
